Code Description
In general (see the exception below), the ordinary differential equations (ODEs) of the qgs model are at most bilinear
in their variables \(\eta_i\) (\(1\leq i\leq\) ndim).
This system of ODEs can therefore be expressed as the sum of
a constant, a matrix multiplication, and a tensor contraction:
This expression can be further simplified by adding a dummy variable that is identically equal to one: \(\eta_0\equiv 1\). This extra variable allows one to merge \(c_i\), \(m_{i,j}\), and \(t_{i,j,k}\) into the tensor \(\mathcal{T}_{i,j,k}\), in which the linear terms are represented by \(\mathcal{T}_{i,j,0}\) and the constant term by \(\mathcal{T}_{i,0,0}\):
The tensor \(\mathcal{T}\) is computed and stored in the QgsTensor.
Recasting the system of ordinary differential
equations for \(\eta_i\) in the form of a tensor contraction has certain
advantages. Indeed, the symmetry of the tensor contraction allows for a unique representation
of \(\mathcal{T}_{i,j,k}\), if it is taken to be upper triangular in the last two
indices (\(\mathcal{T}_{i,j,k} \equiv 0\) if \(j > k\)). Since
\(\mathcal{T}_{i,j,k}\) is known to be sparse, it is stored using the
coordinate list representation, i.e. a list of tuples
\((i,j,k,\mathcal{T}_{i,j,k})\) defined by the class sparse.COO.
This representation renders the computation of the tendencies \(\text{d}\eta_i/\text{d}t\) computationally very efficient as
well as conveniently parallelizable.
The form of the ODEs allows also to easily compute the Jacobian matrix of the system. Indeed, denoting the right-hand side of the equations as \(\text{d}\eta_i/\text{d}t = f_i\), the expression reduces to
The differential form of the tangent linear model (TL) for a small perturbation \(\boldsymbol{\delta\eta}^\text{TL}\) of a trajectory \(\boldsymbol{\eta}^{\ast}\) is then simply [Kal03]
Special case with the quartic temperature scheme
In case the quartic temperature scheme is activated, as detailed in the section Dynamical temperatures and quartic temperature tendencies model version, then the above system of ODEs becomes
The Jacobian matrix becomes
and the tangent linear model can be shown to be provided by the following equation:
Computational flow
The computational flow is as follows:
The parameters are specified by instantiating a
QgParams.The inner products are computed and stored in
AtmosphericInnerProductsandOceanicInnerProductsobjects.The tensor of the tendencies terms are computed in a
QgsTensorobject.The functions
create_tendenciescreate Numba optimized functions that return the tendencies and the Jacobian matrix.These functions are passed to the numerical integrator in the module
integrator.
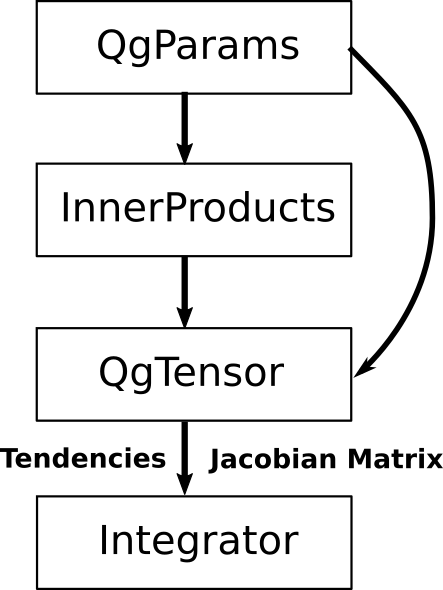
Sketch of the computational flow.
Generating Symbolic Equations
Using Sympy qgs offers the functionality to return the ordinary differential equations of the projected model as a string, with any parameters the user chooses to be returned as varibales in the equations. In addition, the resulting equations can be returned already formatted in the programming language of the users’ choice. This allows the qgs framework to feed directly into pipelines in other programming languages. Currently the framework can return the model equations in the following languages:
Python
Julia
Fortran 90
AUTO-p07 continuation software
Mathematica (still being tested)
This also allows the user to specify their own integration method for solving the model equations in Python.
Additional technical information
qgs is optimized to run ensembles of initial conditions on multiple cores, using Numba jit-compilation and multiprocessing workers.
qgs has a tangent linear model optimized to run ensembles of initial conditions as well, with a broadcast integration of the tangent model thanks to Numpy.
The symbolic output functionality of the qgs model relies on Sympy to perform the tensor calculations. This library is significantly slower than the numerical equivalent and as a result it is currently only feasible to generate the symbolic model equations for model resolutions up to \(4x4\).
References
E. Kalnay. Atmospheric modeling, data assimilation, and predictability. Cambridge university press, 2003.